Humanoid Robotic Torso PROTO1



















Humanoid Robotic Torso PROTO1
Published 2017-10-30T14:49:06+00:00
UPDATED 12/30/2018
This is a project that I have been working on for 3 years now. I've published other prototype robotic arms and prosthetics I've designed mainly as a hobby including my "Humanoid Robotic Hand" which was just the arm of Proto1. The publishing of the complete set of files for the robot has been long overdue, but I've published the first prototype of the robot here and gotten much-needed feedback through an amazing community. I designed this robotic arm to be affordable, simple, and innovative. The total cost is around $300 and doesn't require an absurd amount of work to assemble.
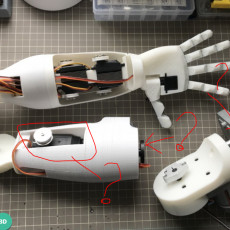
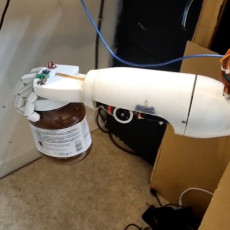
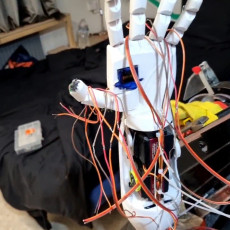
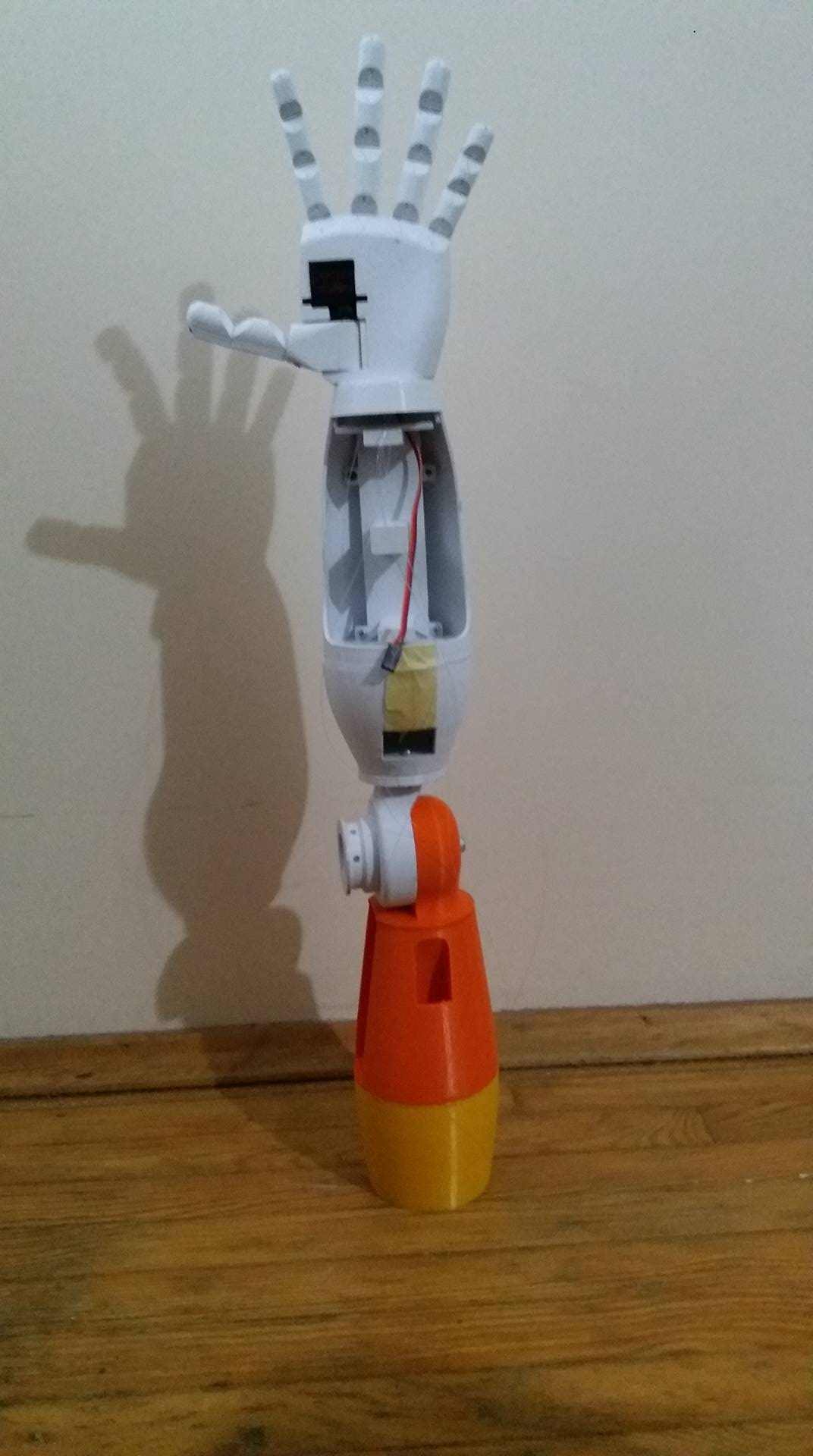
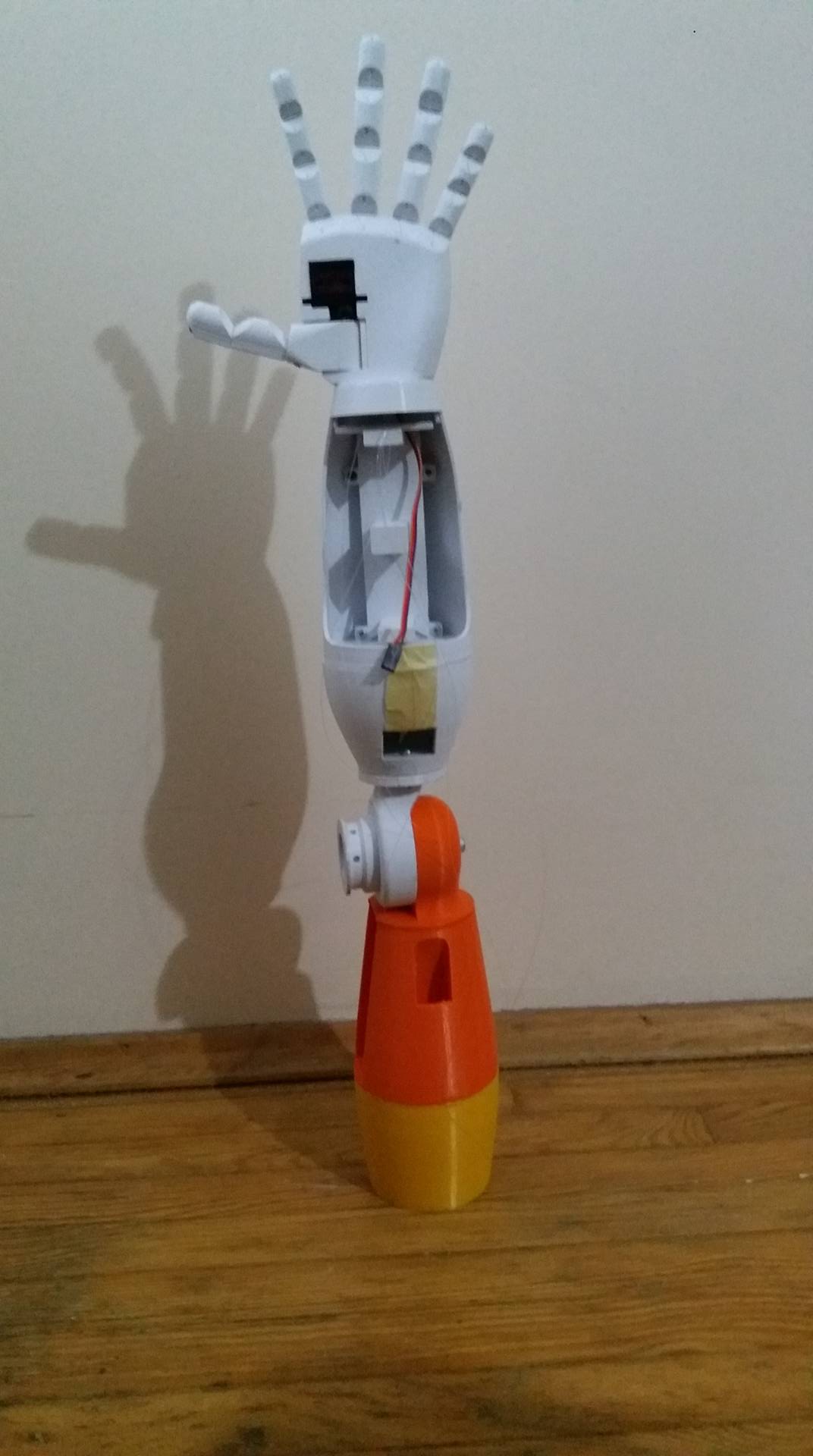
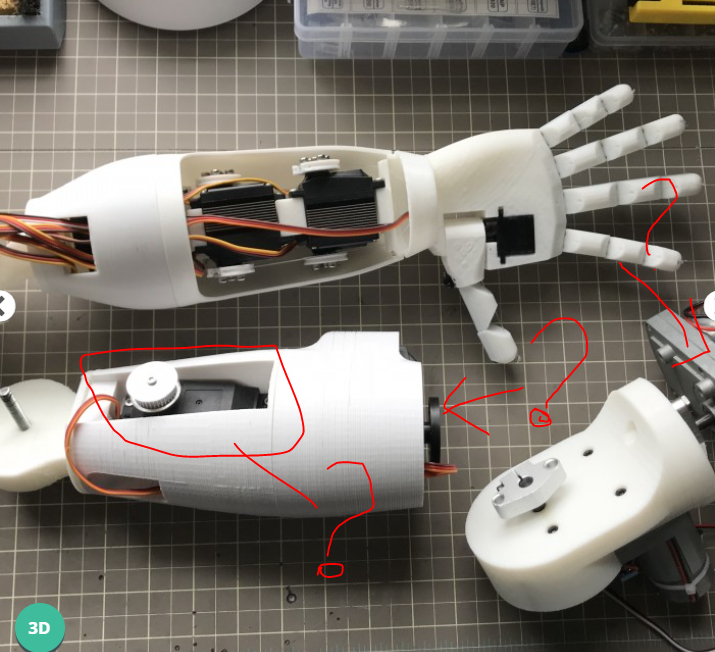
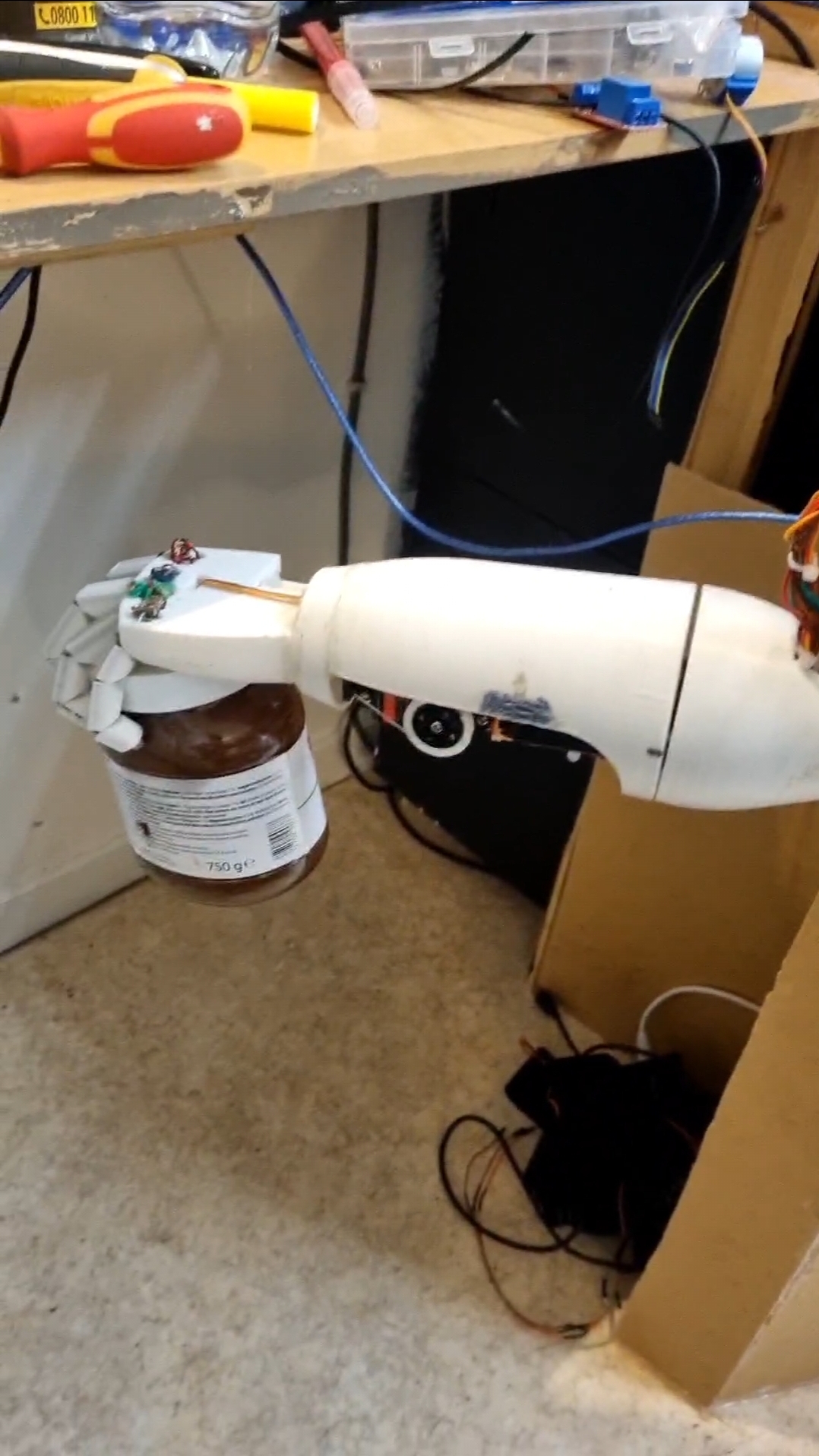
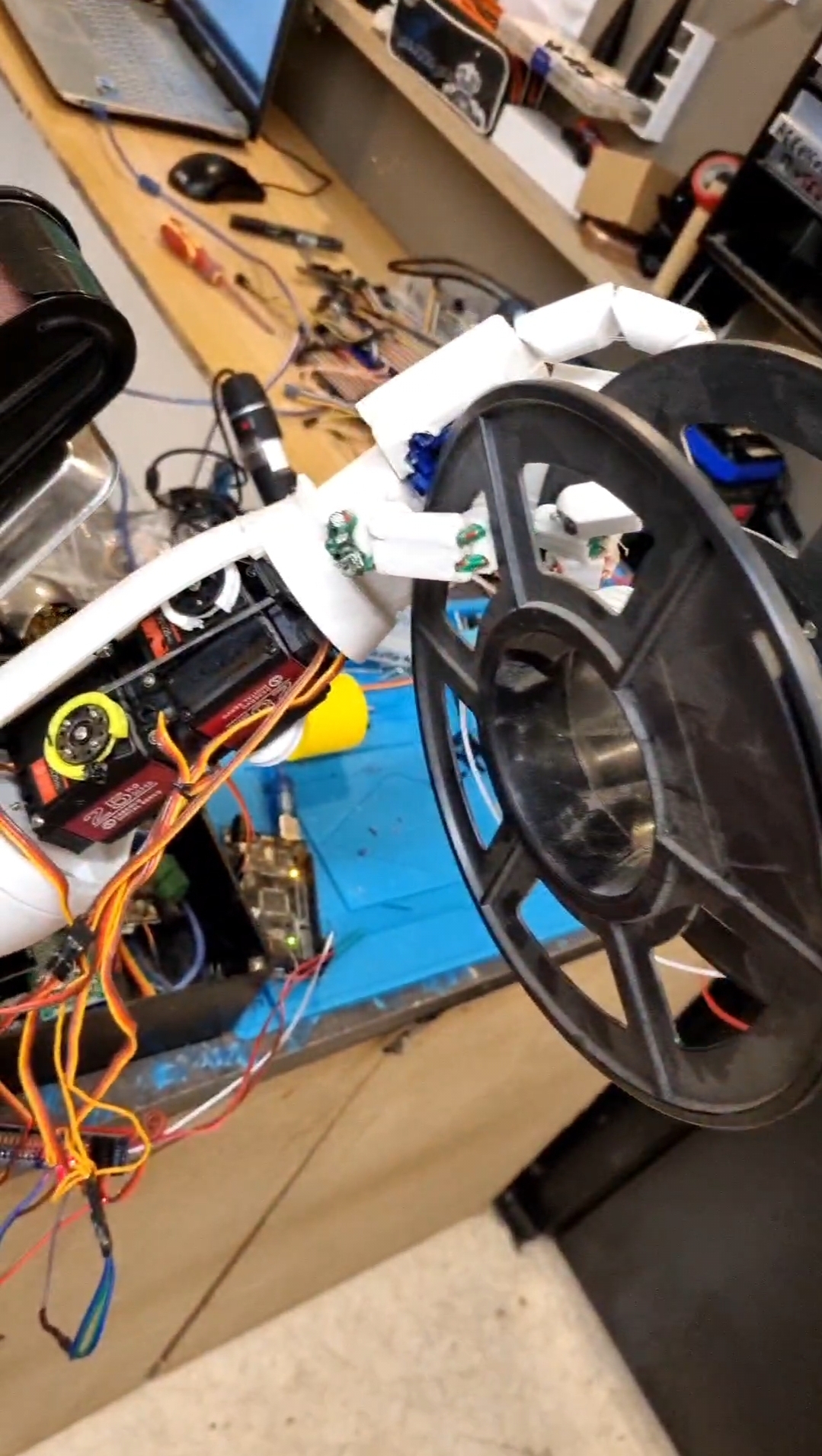
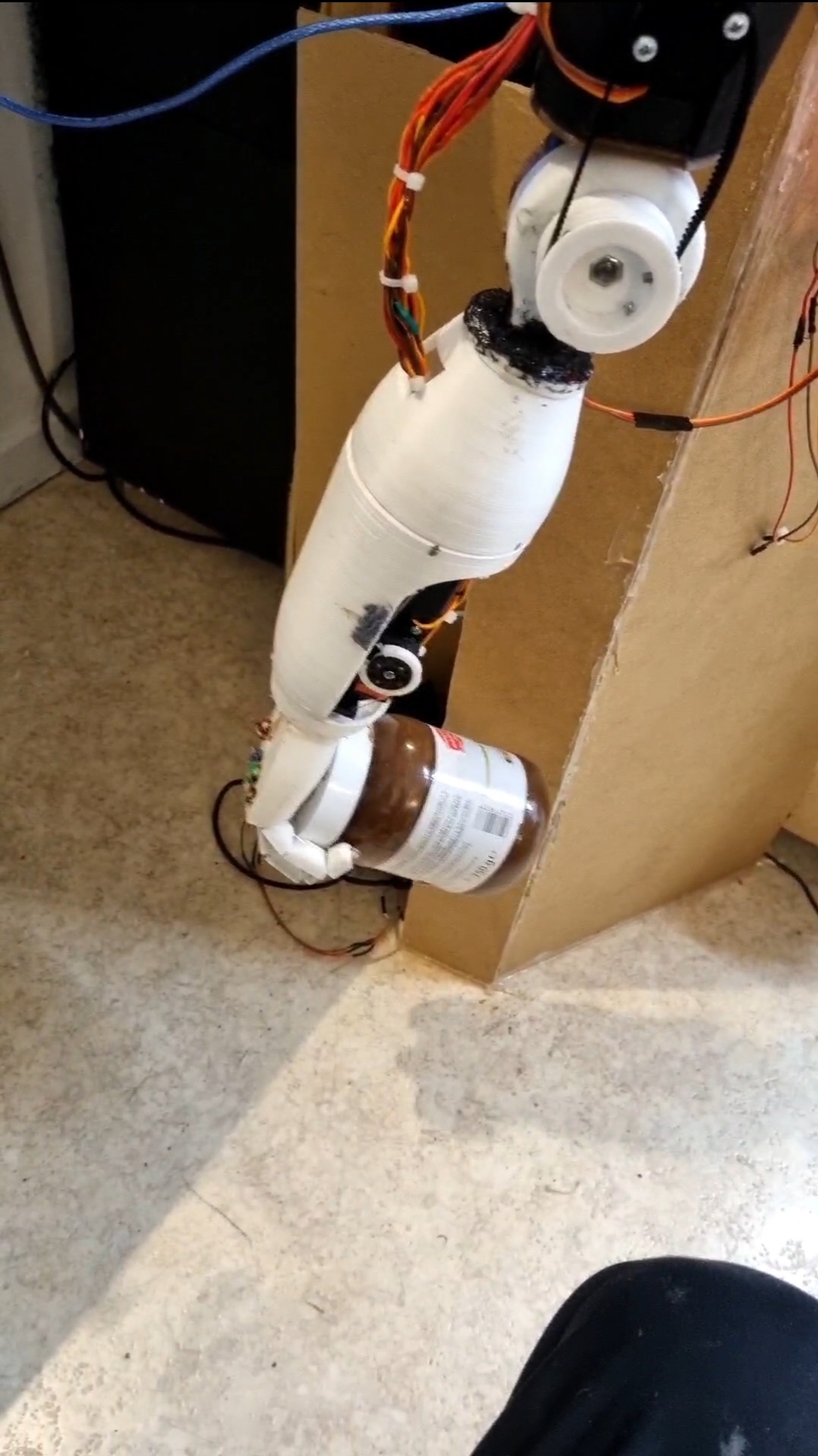
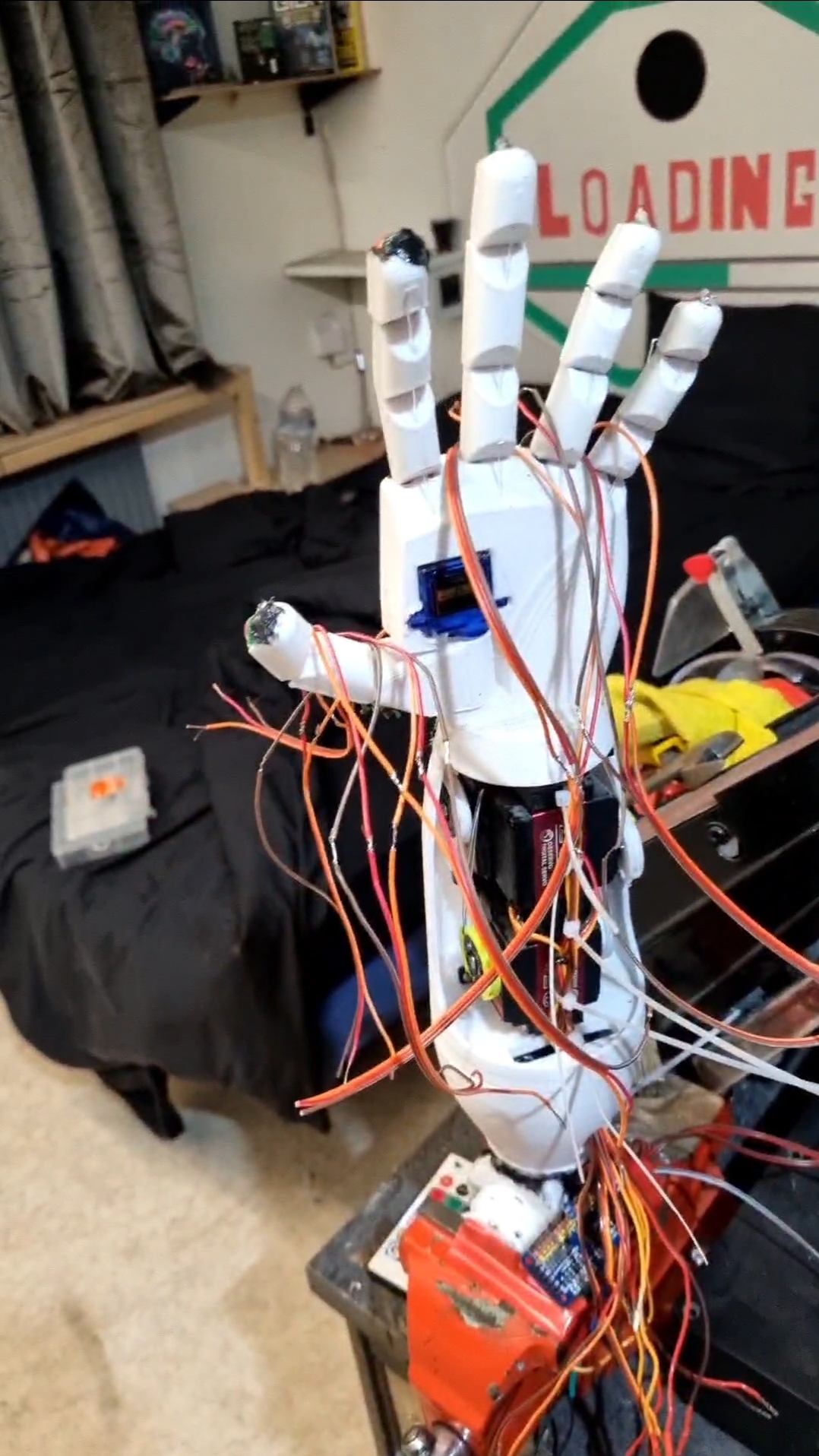
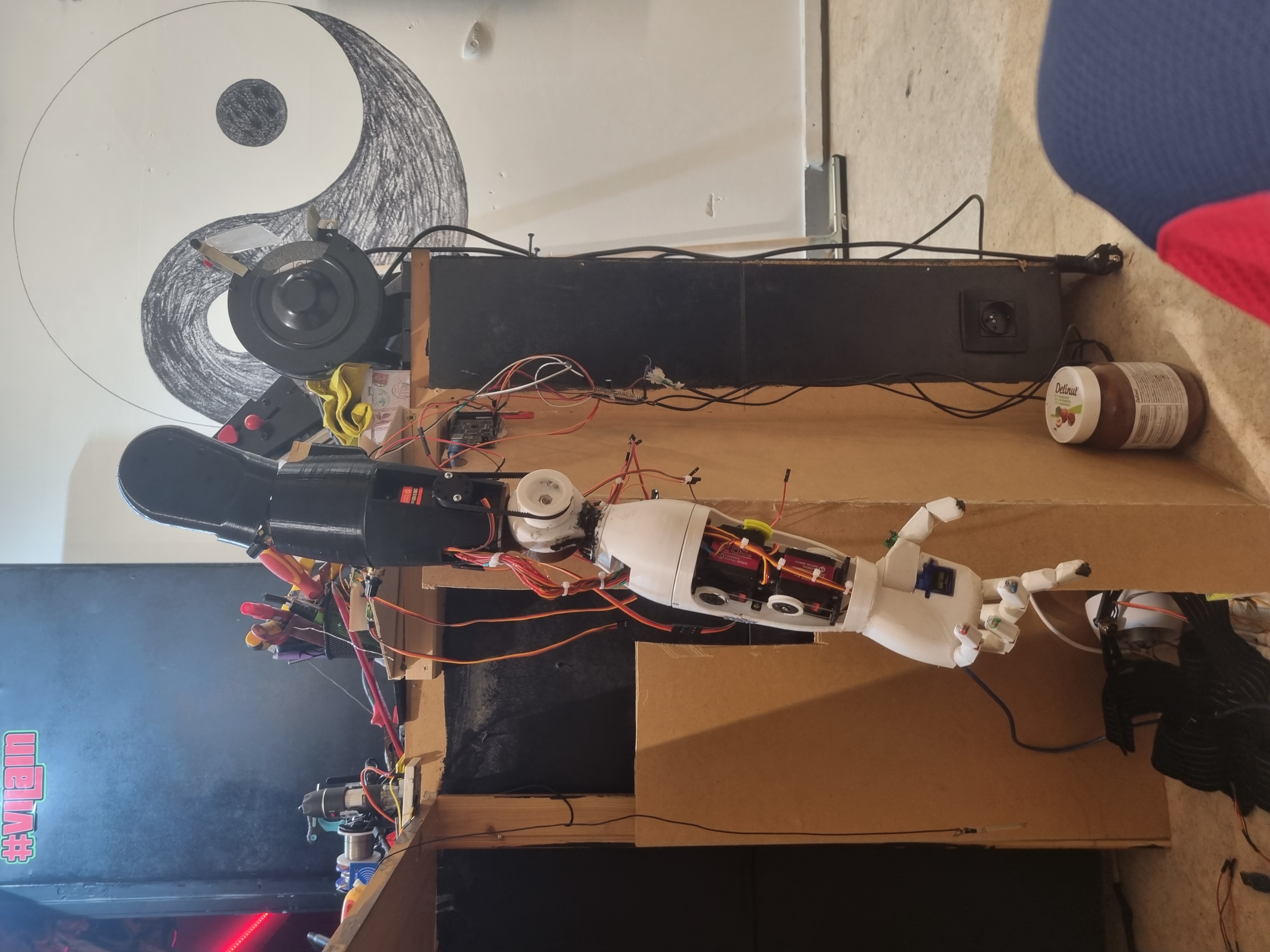
The arm features a 3-axis shoulder to obtain full human motion. The elbow uses a large servo connected to it by a grooved belt (the same kind of belt used on most FDM 3D printers), the belt allows the full 180 degree range of the servo to be channeled into the ≈100 degrees that the elbow moves. This is visualized much better in the video provided. The hand itself is composed of 6 servos. Between those 6 servos, it's able to obtain 180degree wrist motion, an opposable thumb, and individual finger motion for all fingers except the ring and pinky which move as one unit (So you can't do the rock sign with it :'( but you CAN give the peace sign or flip the bird if it's ever necessary). The hand grips very well and I've put it through some rigorous testing. The arm is strong enough to lift small objects and you can get a sense of the full freedom it has in the videos down below. The largest piece is 91mm x 91mm x 127mm so if your printer can print those dimensions it will be able to print every piece just fine.
The full Parts List for a single arm is:
- Flexible Nylon Paracord
- Standard sized servos x5 (these are the servos I used but any standard sized servo will work well)
- Micro servo (like the standard servo- this is where I got the micro servo I used but there are many other models applicable)
- Fishing line between .5mm and .8mm in diameter (you can get this anywhere in stores or online)
- 60kg.cm Servo x2
- Minimum of 110kg.cm torque servo x2, (I used 110kg.cm servo in my design and it worked incredibly well, but the higher torque ones will make the shoulder stronger)
- Large servo screw hub x2
- M3 screw assortment
- Servo wire extensions (I got mine off of amazon, I won't post the link because there are so many sellers you can get these from)
- Method of control (I use a number of different programs to control the arm such as the arduino and pololu servo, all the code used in the videos below can be found at my partner's github: CODE USED FOR THE ARM)
If you want more info on myself and my partner who helped make this, check out our website at AGBOTICS.tech
HELP KEEP THIS PROJECT OPEN SOURCE BY DONATING. This project is the culmination of years of research, designing, and testing. By keeping it open source I'm able to bring robotics to people all over the world, but it's not cheap. I've poured so much of my own money into PROTO1 and I can only continue releasing new designs as long as I am able to afford it. Please become a supporter!
If you have any comments or questions you can leave it down below or email me at info@agbotics.tech If you've made the arm I'd love to see it and you can post a picture in community prints or email it to me.



- Fingers & Hand: .3mm layer height or less, >10% Infill, normal shells, no support
- Forearm 9-3 Forearm 9-1: .3mm layer height or less, >10% infill, normal shells, normal support structure
- Forearm 9-2: .3mm or less, >10% infill, normal shells, no support structure
- Elbow pieces: .2mm or less, >15% infill, Large shells, normal support structure
- Bicep Pieces: .3mm or less, >10% infill, normal shells, normal support structure
- Shoulder Piece 1: .1mm or less, >20% infill, Large shells, normal support structure
- Shoulder Piece 2: .2mm or less, >20% infill, large shells, normal support structure
Most any kind of hard plastic works with this robot, I use mainly PLA but ABS, PETG, and Nylon all work as well.
| Date published | 30/10/2017 |
| Dimensions | (largest) 91x91x127 |
| Complexity | Easy |







I made one