Planar Two to One Way Mechanism








Planar Two to One Way Mechanism
Published 2022-03-08T19:18:01+00:00
Assembly Video: https://youtu.be/0pOq9ngmYwc
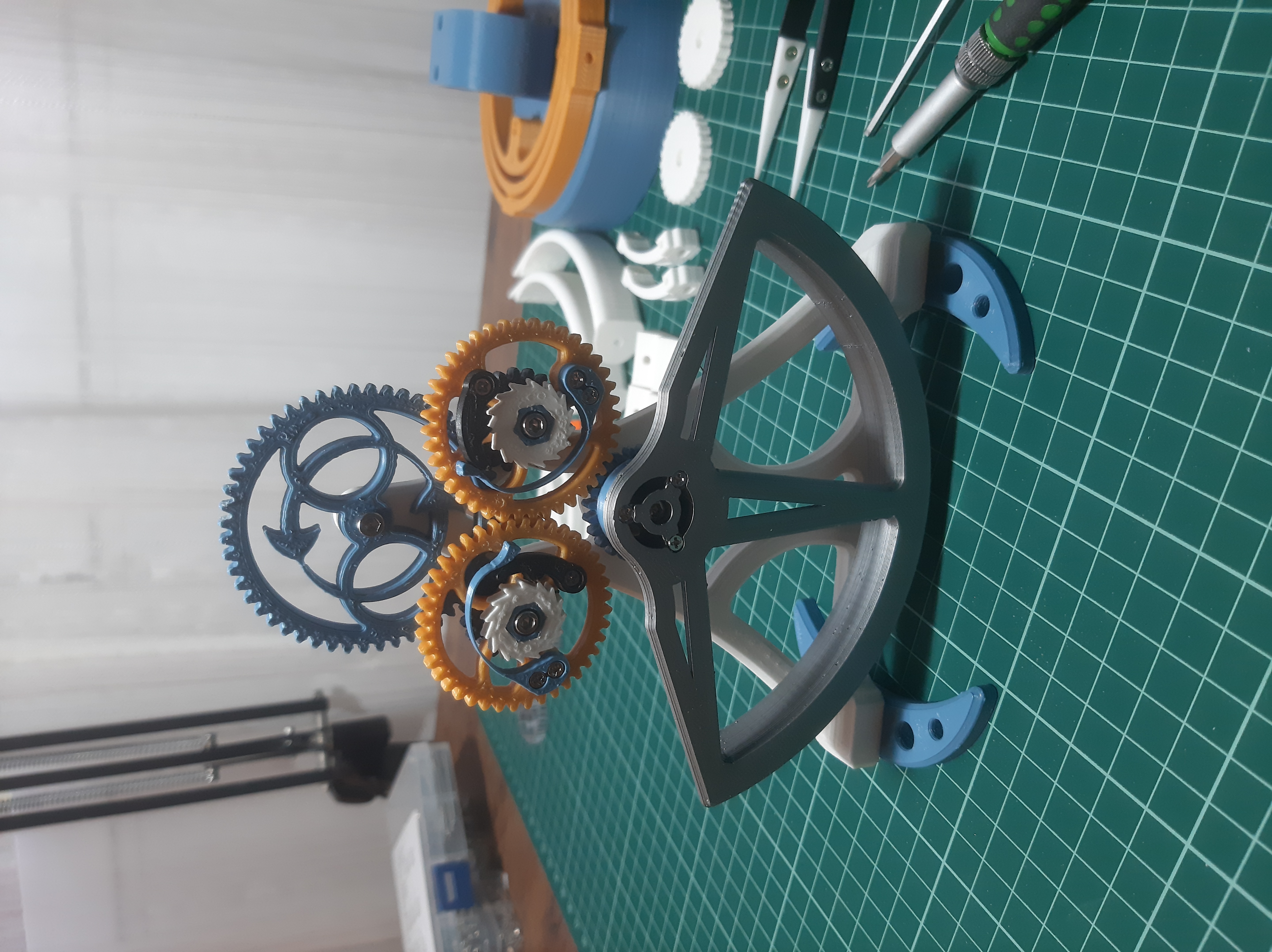
The two-way to one-way mechanism can be found in most modern automatic watch movements. It is designed in a "flat" or planar configuration to fit the thin movement's case. I've seen other printable designs that use bevel gears, but this planar design makes it much easier to visualize and understand how it works.
A PDF Assembly guide can be found in the zip file package.
Non printable hardware:
M2x6 Screw: x9
M3x10 Screw: x6
M3x14-16 screw: x3
Optional: MR63ZZ Bearing (X2) Link
Update 10/03/22:
Fixed file naming errors and added missing bearing option input gear





All parts are printed in PLA
20% infill, 0.15mm layer height
Special part: 11_Rotor must be printed with 100% infill.
Use a 3mm drill bit to loosen the pivot holes if necessary.
Screws must be loosely tightened to allow the gears to rotate freely.
| Date published | 08/03/2022 |
| Time to do | 20 - 30 minutes |
| Material Quantity | 100 |
| Dimensions | 70x170x120 |




Works very well! But in the Screws für the 07_Ratchet_Paw and the 09_Ratchet Spring are not M3. Used M2 instead.